Робота-лінивця навчили лазити по канатах
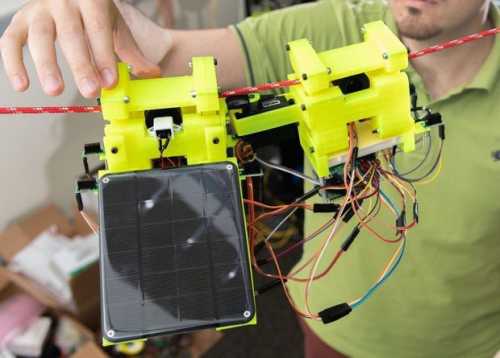
Американські інженери розробили робота-лінивця, здатного лазити по канатах і переміщатися з одного канату на інший. Завдяки відносно малому споживанню енергії та використанню сонячних панелей такого робота можна практично необмежений час використовувати для спостережень на деревах у лісі, розповідають автори статті, представленої на конференції ICRA 2019, інформує Ukr.Media.
Створення роботів, здатних лазити по канатах — важлива технологічна задача, напрацювання з якої потенційно застосовні в багатьох областях. Приміром, у 2016 році в Росії створили робота для перевірки високовольтних ліній електропередачі. Дрон спускає такого робота на грозозахисний канат, після чого той самостійно переміщується вздовж основних проводів і оглядає їх. Крім того, потенційно таких роботів можна застосовувати для досліджень у густих лісах, в яких гілки сусідніх дерев стикаються.
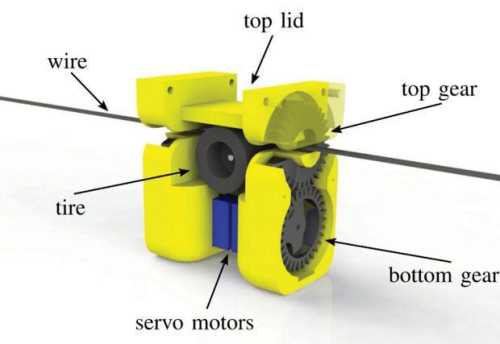
Інженери з Технологічного інституту Джорджії під керівництвом Магнуса Егерштедта (Magnus Egerstedt) надихнулися лінивцями і вирішили створити енергоефективного робота, на основі якого можна було б створити робота, який здатен лазити по гілках. Робот складається з двох частин і пересувається завдяки колесу в кожній частині, дотичного з канатом.
Крім того, в кожній частині робота є два повноцінних зубчастих колеса і два пов'язані з ними, але з вирізаним сектором. Всередину таких зубчастих колес протягнутий канат. При русі вперед воно розташоване таким чином, щоб канат не міг вийти за його межі. Якщо ж роботу необхідно перейти на суміжний канат, колесо повертається так, щоб виріз розташовувався горизонтально. Переміщатися між суміжними канатами роботу допомагає ще один двигун в петлі, що з'єднує дві частини.
Для живлення робот використовує акумулятор ємністю 1000 міліампер-годин, а також дві сонячні панелі, розташовані з боків однієї з частин. Розробники відзначають, що завдяки застосуванню коліс для руху по канатах, а також пасивному механізму утримання, робот має більшу енергоефективність, ніж інші роботи, призначені для переміщення по канатах.

Крім створення апаратної платформи інженери також написали для робота програмне забезпечення, що дозволяє йому самому прокладати шлях по канатах. Користувач може вказати точку, за якою необхідно спостерігати, після чого робот, маючи карту системи канатів, самостійно може розрахувати шлях до найбільш близької до заданої точки споглядальної позиції.
Раніше інженери з Технологічного інституту Джорджії створили іншого робота-лінивця для роботи на канаті. Він так само складається з двох частин, але має зовсім іншу конструкцію і принцип роботи. Він здатний зачіпатися кінцем однієї частини за канат розгойдувати іншу, щоб потім зачепитися. Після цього він може відпустити першу частину і знову почати розгойдуватися для того, щоб рухатися далі.
Джерело: ukr.media